Contenido
- 1.- Introducción
- 2.- ¿Qué es un Robot?
- 3.- ¿Cuáles son los elementos que conforman un Robot?
- 4.- Materiales a utilizar
- 5.- Funcionamiento, aplicación y esquemático de los componentes: L293D, Trimpot, SNY70, LED, Motorreductor, LM7805, Interruptor, Resistencia y Fuente de alimentación
- 6.- Video Ensamble del Chasis Seguidor de líneas
- 7.- Circuito de control Robot seguidor de líneas
- 8.- Prueba de funcionamiento
- 9.- Recomendaciones
- 10.- Video Tutorial
1.- Introducción
La finalidad de este tutorial es enseñarte a armar un mini robot educacional básico paso a paso.
Cómo sabemos la robótica es, sin lugar a dudas, uno de los temas favoritos en los que un joven estudiante piensa cuando decide dedicarse a la ingeniería, es una rama de la ciencia sumamente atractiva.
Desde luego que la ciencia ficción ayudo mucho a aumentar su popularidad, sin embargo, en la actualidad su popularidad la ha ganado con creces al mostrar todos los beneficios que tiene su aplicación en muchas áreas del conocimiento.
El objetivo principal de un robot es la realización de tareas mediante ejecuciones de movimiento dentro del medio.
Para realizar las distintas tareas que se les asignan, los robots deben contar con un diseño mecánico único y adaptado a las necesidades o requerimientos, de tal manera que los robots puedan ser: vehículos con ruedas, manipulares en forma de brazo, sistemas aéreos con alas o hélices, etc.
Próximamente se estarán realizando nuevos tutoriales donde se realizarán el armado de nuevos robots educacionales con distintas características.
El contenido que veremos para llevar a cabo el tutorial mini robot educacional será el siguiente:
2.- ¿Qué es un robot?
Un robot es un dispositivo electromecánico capaz de interactuar en un medio sujeto a las leyes físicas, el cual incluye un sistema de sensores y un sistema de actuadores, que en conjunto son regulados a través de una unidad de control.
3.- ¿Cuáles son los elementos que conforman un Robot?
Un robot cuenta con cuatro componentes básicos que en conjunto le permiten alcanzar el objetivo de las tareas específicas. Los cuatros componentes básicos son: sistema de sensores, sistema de actuadores, sistema de control y estructura mecánica.
4.- Materiales
Los materiales que estaremos utilizando son los siguientes:
- Un Kit Mini Robot Educacional
- Dos sensores CNY70
- Un paquete de 4 pilas alcalinas AA
- Un porta pilas para 4 pilas AA
- Una Mini Protoboard 170 Pts
- Un Regulador LM7805
- Cables Dupont largos Macho-Hembra
- Cables Dupont cortos Macho-Macho
- Un Interruptor
- Una Resistencia 220 Ohms
- Un puente H – L293D
- Un Trimpot de 50 ohms
- Un metro de alambre negro
- Una cinta de aislar
- Un LED 5 mm Difuso
- Una tira header macho 40 pines Macho 2.54 mm
- Dos Puente corto circuito pin header 2.54mm
- Ligas
Las herramientas que utilizaremos son:
- Cautín
- Soldadura y pasta
- Un desarmador de cruz
- Pinzas de corte
5.- Funcionamiento, aplicación y esquemático
Antes de iniciar con la realización del tutorial mini robot educacional, deberás conocer cómo funciona cada dispositivo, su aplicación común y su esquemático.
En la imagen izquierda encontraras el componente cómo es físicamente y en el derecho su esquemático.
¿Qué es un esquemático? es la representación pictórica de un circuito eléctrico. Muestra los diferentes componentes del circuito de manera simple y con pictogramas uniformes de acuerdo a normas, y las conexiones de alimentación y de señal entre los distintos dispositivos.
Nuestro circuito de control estará conformado por un puente H L293D, este integrado es de gran utilidad para controlar pequeños motores y actuadores de corriente directa. A demás los permitirá controlar el sentido de giro de los motores, avance y retroceso.
Así mismo cuenta con solo 16 pines. Los pines 4, 5, 12 y 13 son para conectar la polaridad negativa (Nota: Relacionaremos los 0 volts igual a GND y Negativo), los pines 3 y 6 son para controlar el motor M1, el 11 y 14 para el motor M2.
El pin 16 es para alimentar el circuito integrado con 5VDC, el pin 8 es donde se alimentará el voltaje para los dos motorreductores siendo este 6VDC y para los sensores cny70 se utilizarán los pines 7 y 10.
Se utiliza principalmente para las ingenierías en electrónica, robótica y electromecánica.

Ilustración 1: Puente H L293D
Los motores DC son máquinas que convierten la energía eléctrica en energía mecánica, provocando un movimiento rotatorio en su eje. Los motores qué estaremos utilizando son dispositivos electromecánicos “Motorreductores” ya qué internamente poseen una caja de engranes que los permitirán reducir la velocidad a un alto par.
Estos motorreductores realmente solo cuentan con dos conexiones, de los cuales uno se debe conectar al positivo y el otro a negativo. Un dato curioso es que cuando buscamos cambiar el sentido de giro del eje, solo bastaría con invertir la polaridad.
Son encontrados en aplicaciones tan diversas como aparatos electrodomésticos, robótica, industria, juguetes, etc.

Ilustración 2: Motorreductor
El regulador LM7805 es un dispositivo electrónico que los permitirá regular los 6VCD provenientes de nuestras pilas alcalinas AA a 5 VDC en la salida. Cuenta con tres pines, el pin 1 corresponde al voltaje de entrada, el 2 pin al negativo “GND o 0 volts” y el 3 pin es el voltaje de salida regulado.
Su aplicación es muy fundamental, ya que la mayoría de los componentes electrónicos funcionan a 5 VCD.

Ilustración 3: LM7805
El interruptor es un dispositivo que los ayudara a abrir o cerrar el paso de la energía eléctrica. Básicamente los permitirá apagar o encender el mini robot educacional.
Estos interruptores cuentan con tres pines, en términos generales cuando hay un cambio de posición en la palanca mecánica internamente se cierra el circuito. Cuando la palanca vuelve a su posición original el circuito se abre no permitiendo circulación de corriente eléctrica.
Una manera de verificar la posición de abierto o cerrado es jugando con la palanca mecánica y verificando continuidad en cada uno de los pines. Cuando hay continuidad en los pines significa que circulará corriente pero cuando no lo hay no circula flujo de energía.
Su aplicación se encuentra en todos los hábitos de la electrónica se considera un componente fundamental a la hora de realizar un circuito electrónico.
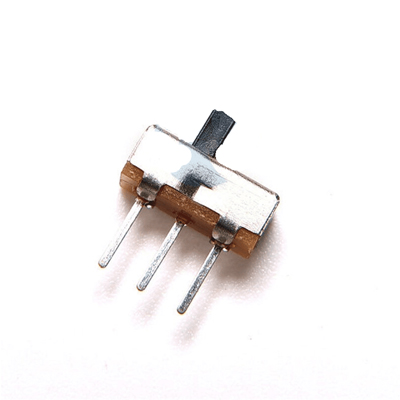
Ilustración 4: Interruptor
Los Trimpot son resistencia cuyo valor es posible variar. El valor que tendrá nuestra resistencia será de 50 ohms, eso significa que podremos regular nuestro valor desde 0 a 50 ohms. A demás nos ayudara a reducir el paso de la corriente eléctrica de nuestros motorreductores.
Estos cuentan con tres pines, con ayuda del multímetro en escala de resistencia podemos medir su resistencia fija del pin 1 al pin 3, pero si nosotros buscamos una resistencia variable solo basta con medir los pines 2 y 3 o 1 y 2.
Una de sus aplicaciones más comunes es para aumentar o disminuir la velocidad de motores eléctricos DC.
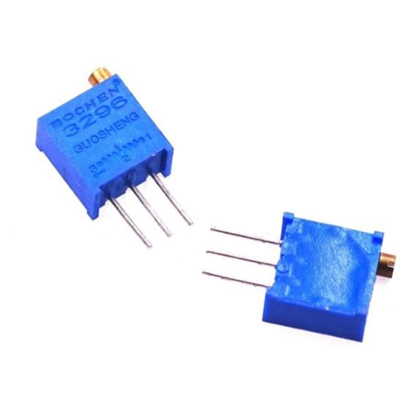
Ilustración 5: Trimpot
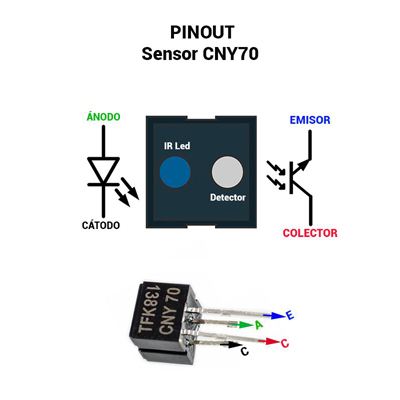
Los sensores CNY70 son captadores ópticos infrarrojos que se utilizan para detectar colores de objetos y superficies. Internamente están formados por un emisor de radiación infrarroja (fotodiodo) y un receptor (fototransistor).
Su funcionamiento consiste, cuando el sensor cny70 detecta una línea o superficie completamente negra nos enviará un voltaje de 0 volts a la salida, pero cuando el sensor detecta una línea o superficie blanca está envía un voltaje de 5 volts a la salida.
Cuentan con cuatro pines, el cual dos de ellos corresponden al fotodiodo y los restantes al fototransistor.
El pin del ánodo se polariza en positivo, así como el colector, el pin del cátodo se polariza a negativo y el emisor es el pin de salida.
Una de las aplicaciones más comunes es para construir robots educacionales.
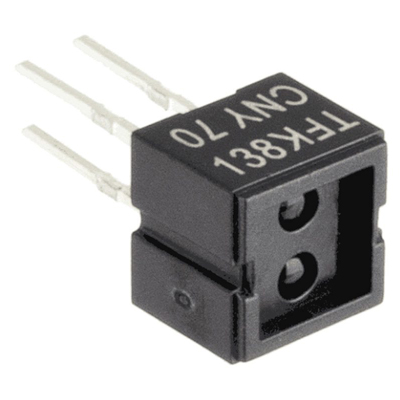
Ilustración 6: Sensor CNY70
El Led son componentes eléctricos semiconductores (diodos) que son capaces de emitir luz al ser atravesados por una corriente pequeña. Las siglas “LED” provienen del inglés “Light Emitting Diode”, que traducido al español es “Diodo Emisor de Luz”.
Cómo hemos visto hasta este momento en este tutorial mini robot educacional, es importante que conozcas más acerca de los componentes qué estaremos utilizando, para que se te haga más fácil su desarrollo y evites fallas futuras.
Continua con la realización del ensamble del chasis mini robot educacional.
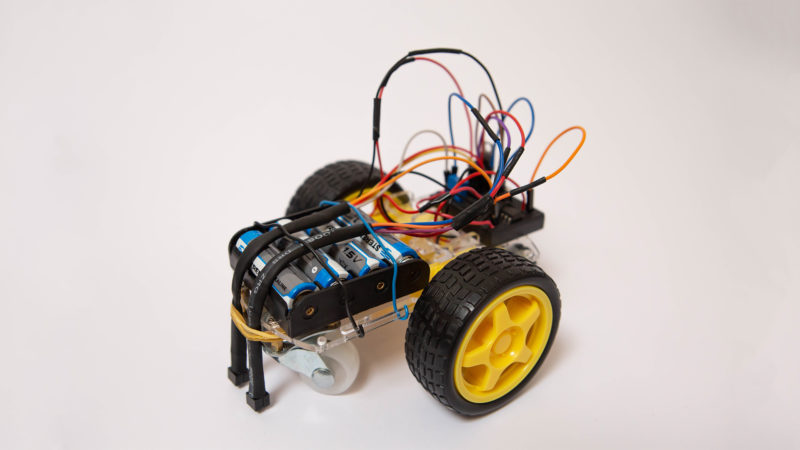
6.- Armado del chasis Mini Robot seguidor de líneas
Finaliza con el ensamble y después pega la Protoboard al chasis y atornilla la porta pilas. Continua con las conexiones siguientes:
7.- Diagrama de conexión
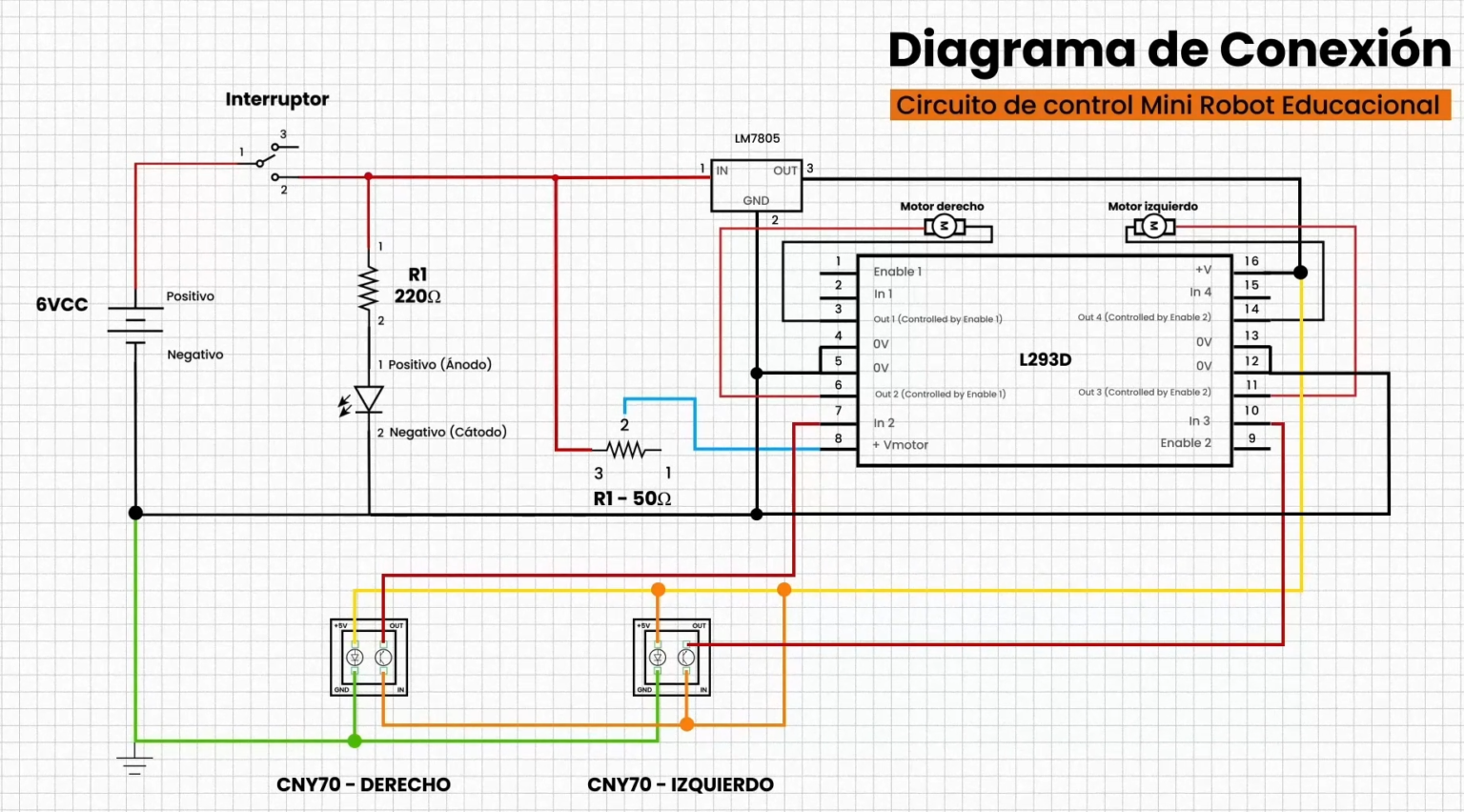
No olvides soldar los cables “Rojo y Negro” que vienen incluidos en el kits a las terminales de cada uno de los motorreductores. A continuación te mostrare los pines del sensor cny70.
Identificar el cátodo (negativo), ánodo (positivo), colector y emisor del Sensor CNY70. Nuestro cátodo estará indicado con el cable verde, el ánodo por el amarillo, el colector por el naranja y el emisor por el rojo.
Conecta los cátodos de los sensores a negativo, después los ánodos a 5VCD positivo, así como el colector. La salida del sensor derecho, que es el cable de color rojo lo conectaremos al pin 7 del L293d, para el sensor izquierdo conéctalo al pin 10.
Utiliza las ligas para ajustar los cables de los sensores CNY70.
8.- Prueba de Funcionamiento
9.- Recomendaciones
Si tienes complicaciones a la hora de colocar los sensores CNY70 puedes utilizar pegamento frio o caliente. Te cuidado ya que podrías quemarte.
Si tienes complicaciones con el avance de los motores. Es decir si tu robot tiene un avance hacia atrás solo invierte los cables de los pines 3 y 6 “Motor Derecho” del circuito integrado l293d o los pines 11 o 14 “Motor Izquierdo”, si fuera el caso.
Utiliza tu imaginación para mejorar tu carrito seguidor de líneas. No olvides seguirnos en nuestras redes sociales y YouTube.
10.- Video Tutorial
A continuación te mostrare el video tutorial:
Tutorial – Robot Educacional – Nivel Básico
Un gran diseño y muy interesante quisiera saber más sobre este robot
Este mini robot seguidor de líneas es un proyecto educativo pensado para aprender de forma práctica los fundamentos de la robótica y la electrónica, ya que integra sensores, actuadores, control de motores y una estructura mecánica en un solo sistema. Su funcionamiento se basa en los sensores CNY70, que detectan el contraste entre la línea negra y el fondo blanco para corregir la trayectoria del robot automáticamente.
Si quieres profundizar más, puedes experimentar con mejoras como ajustar la velocidad de los motores con el trimpot, optimizar la posición de los sensores, modificar la alimentación o incluso migrar el control a un microcontrolador para agregar nuevas funciones.