
En la presente entrada se muestran las consideraciones a tener en cuenta para armar un puente H usando componentes discretos y a partir de ello las ventajas del uso de Drivers en forma de ASICs, además se realiza un despliegue de las características más importantes entre diferentes drivers comerciales presentes en el catálogo de UNIT Electronics utilizados para controlar la velocidad y dirección de giro en motores DC de pequeña y mediana potencia.
Materiales de referencia
- Doble Puente H TB6612FNG
- Doble Puente H MX1508
- DRV8833 Controlador Motor DC Dual
- Puente H L9110s Driver P/2 Motores A Pasos
- L298N Modulo Driver
- BTS7960 Driver Puente H 43A
- IBT-4 Controlador de Motor 50A 3.3V a 12V PWM 200kHZ
Desarrollo
Control de cargas con dispositivos electrónicos
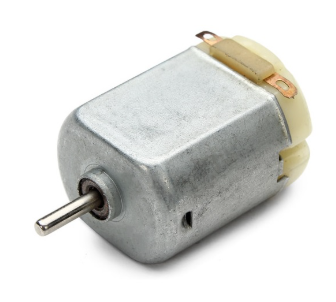
Un microcontrolador como el AVR ATMega328p presente en las bien conocidas tarjetas Arduino UNO R3 absorben (sink) o proveen (source) una corriente máxima por pin de 40 mA aunque lo recomendado es 20 mA para prolongar la vida útil del MCU, mientras que un pequeño motor de DC como el mostrado en la imagen, supera fácilmente esos valores de corriente continua de consumo por lo que podemos estimar que es una carga grande para nuestra tarjeta Arduino y en general para casi cualquier circuito digital por lo que necesitamos de una interfaz eléctrica o electrónica que nos permita controlar cargas grandes por medio de los versátiles microcontroladores.
A continuación mostramos la implementación de un puente H con una de las interfaces de potencia más utilizadas: El transistor 😀
Existen dos tipos principales de transistor dedicados a nuestro cometido: 1) BJT (Bipolar Junction Transistor) y 2) MOSFET (Metal-Oxide Semiconductor Field Effect Transistor)
- BJT
Este tipo de transistor conocido como Transistor de Juntura Bipolar, adquiere su nombre debido a que está armado por dos uniones PN (si, exacto, similar a un Diodo 🙂) como si fuera una especie de “Sandwich”
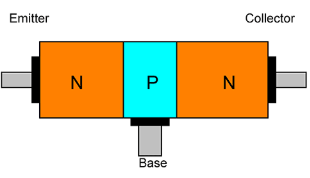
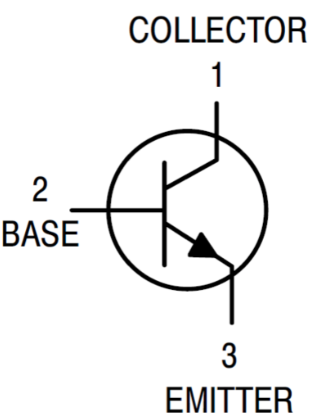
👀Dispositivo controlado por corriente 👀
Con estos dispositivos puedes controlar el paso de una corriente grande de una carga, como un motor o la bobina de un relevador, desde Colector a Emisor (para el tipo NPN) por medio de una pequeña corriente desde la base al emisor (dicha corriente pequeña provendría de nuestro microcontrolador).
2. MOSFET
Este es otro tipo de transistor perteneciente a la familia FET (Transistor de efecto de campo), el cual refiere a la forma en que funciona y es que para que conduzca corriente se debe aplicar una tensión entre las terminales Gate y Source para que formen (MOSFET del tipo enriquecimiento) un canal de conducción entre las terminales Drain a Source por medio de este campo eléctrico.
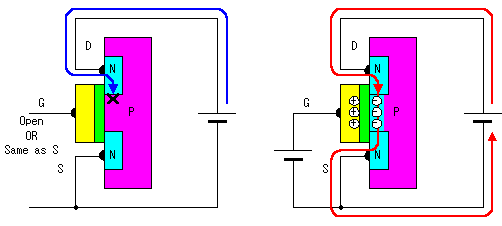
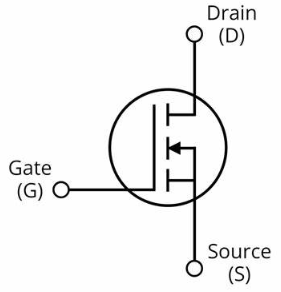
👀Dispositivo controlado por tensión 👀
Con estos dispositivos puedes controlar el paso de una corriente grande de una carga, como un motor o la bobina de un relevador, desde el Drain a Source (para el tipo canal N) por medio de una tensión de control desde el Gate a Source. Dicha tensión de control debe ser mucho mayor a un valor mínimo propio de cada modelo de MOSFET llamado Voltaje umbral o Threshold Voltage (esta tensión de control proviene de nuestro microcontrolador).
Para más detalles, visita nuestra biblioteca de electrónica en la página de Uelectronics
Control del giro de un motor DC
Cambiar el sentido de giro de un motor de corriente continua (DC), se logra invirtiendo la polaridad de la corriente que llega al motor.
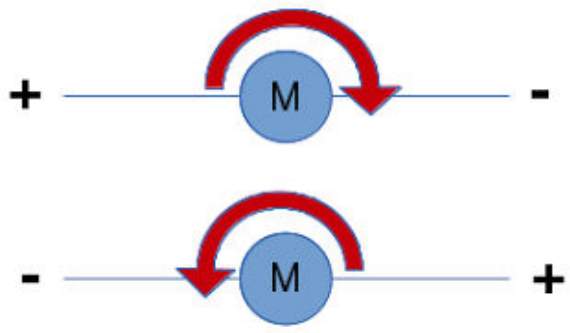
Para ello se utiliza un circuito conocido como “Puente H” debido a la similitud que guarda dicha topología con esta letra del alfabeto.
Puente H
Un puente H es un circuito cuya función principal es permitir que la corriente fluya en ambas direcciones a través de una carga como un motor cuyo control se realiza mediante un microcontrolador o circuito lógico digital a través de interruptores, sin la incómoda necesidad de intercambiar la polaridad conectando y desconectando los cables de alimentación
En el caso de manejar cargas inductivas, como el caso de un motor de DC, el puente H no está completo sin Diodos flyback que nos protejan a los interruptores de los picos inversos de tensión que existen al hacer conmutar una bobina.
Estos picos podrían dañar al transistor, cosa que un diodo conectado en antiparalelo a la bobina o una red Snubber pueden evitar 🙂
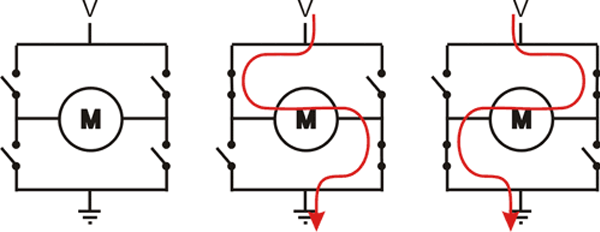
Por lo que el esquema básico queda de la siguiente manera, donde los switches pueden ser transistores BJT, MOSFET o relevadores
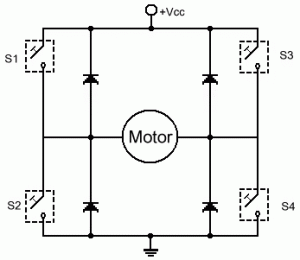
Con el anterior esquema, y usando interruptores con MOSFET canal N es que podemos llegar al circuito básico de un puente H
Obsérvese el cambio en las direcciones de corriente al mover el interruptor que provocan el cambio en el giro del motor.
Por otra parte, el interruptor puede ser fácilmente reemplazado por un microcontrolador como el ATMega328P o un PIC que entrega niveles lógicos de 0 a 5v que para el caso del MOSFET Canal N IRLB3034 es más que suficiente para entrar en saturación.
Drivers / Puentes H para motores de DC
Como ya te pudiste dar cuenta, el diseño de un puente H no es nada trivial y eso que se trata de una configuración básica donde los transistores actúan como interruptores. Por esto es que comercialmente existen ASICs (por sus siglas al español) Circuitos integrados de Aplicación Específica donde algunos cuentan con elementos y prestaciones como protecciones térmicas, anti cortocircuito, anti sobrecorrientes, aislamiento óptico, protección por bajadas de tensión; pines para monitorear la corriente en tiempo real mediante una señal analógica etc.
Todas estas características de aplicación específica embebidas en un solo circuito integrado reducen el espacio que ocupan los dispositivos, el tiempo de implementación del control, a la vez que aumentan la confiabilidad de los sistemas por un bajo precio y complejidad.
De los drivers presentes en el catálogo de UNIT Electronics a la fecha de la publicación de esta entrada se presenta la siguiente tabla:
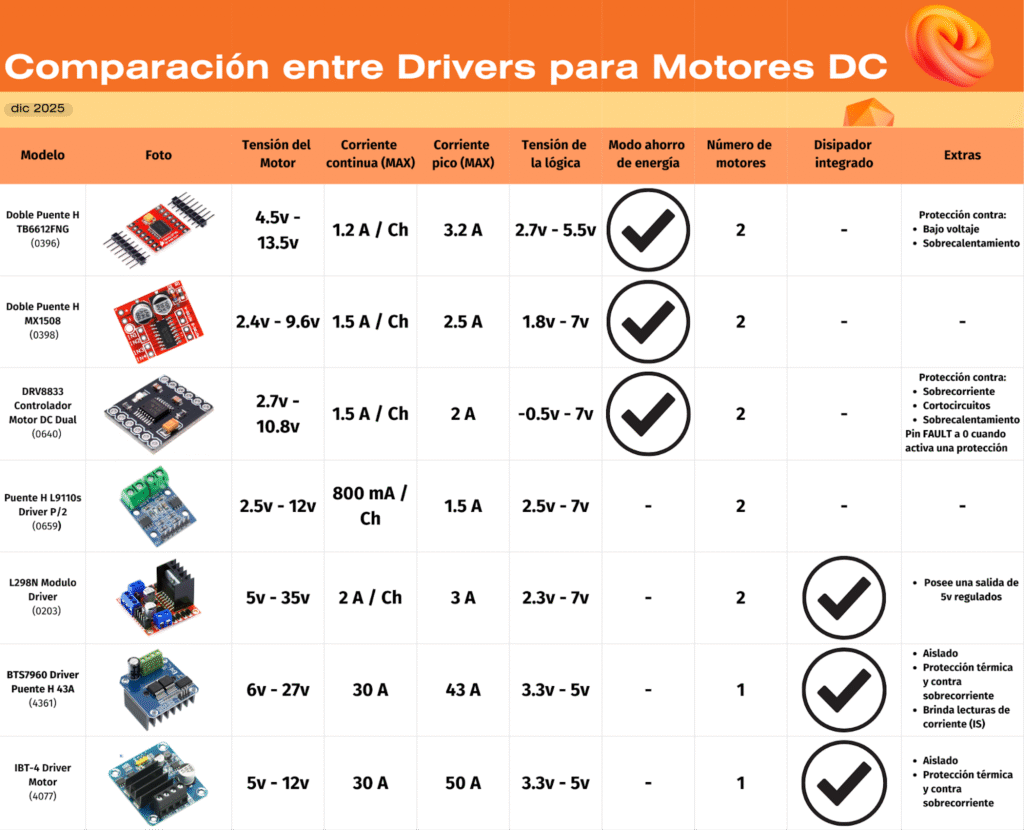
De esta primera comparación podemos notar que existen módulos que se pueden considerar de baja, mediana y alta potencia. Veamos más a detalle algunas de sus características 🙂
Para el uso del Driver de mediana potencia usando el L298N además de una robusta explicación sobre el control de la velocidad usando señales PWM véase la siguiente entrada del BLOG: Controla el giro y velocidad de un motor de DC 😀
Conclusiones
La implementación de un Driver para controlar el giro de un Motor de DC se puede lograr mediante dispositivos discretos donde los transistores, ya sean, del tipo BJT o MOSFET juegan el papel de switches; y los diodos por su parte protegen al sistema de los picos de tensión ocasionados por la conmutación de cargas inductivas como el bobinado interno de los motores. Estos elementos se conectan en una configuración llamada puente H que permite controlar el sentido del giro a través de señales digitales que provengan de un microcontrolador. Sin embargo, esta forma de implementar el controlador, aunque flexible, consume tiempo y recursos, sobre todo si se desea un enfoque en la aplicación. Es en ese escenario donde surge la necesidad de contar con Circuitos Integrados de Aplicación Específica (ASIC) que nos faciliten la tarea, además de contar con protecciones que conformen un sistema de control robusto.
Dichos ASICs se encuentran integrados en populares módulos listos para usar, mismos que cuentan con diferencias de potencia y, por lo tanto, aplicación.
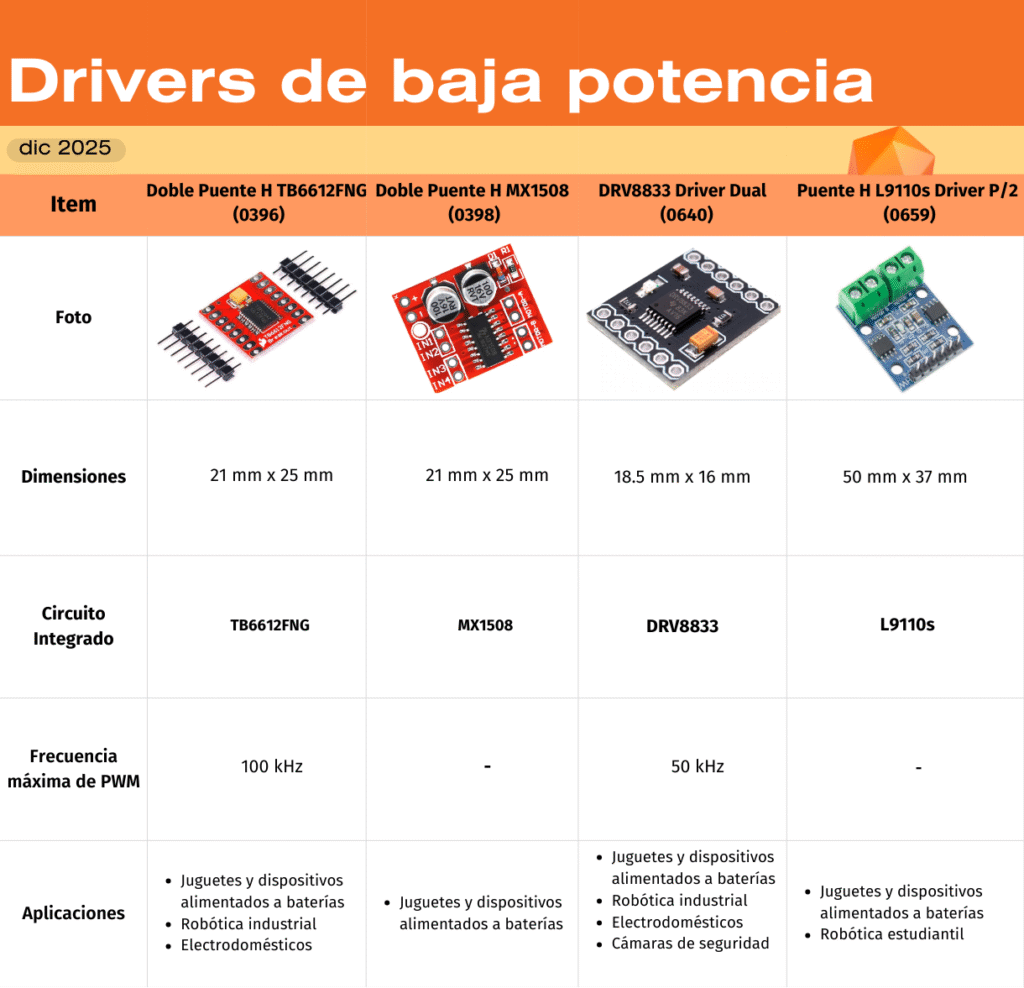
Por ejemplo, los siguientes modelos tienen modos de ahorro de energía y, por consiguiente, son útiles en sistemas alimentados a baterías
| Doble Puente H TB6612FNG | Doble Puente H MX1508 | DRV8833 Driver Dual |
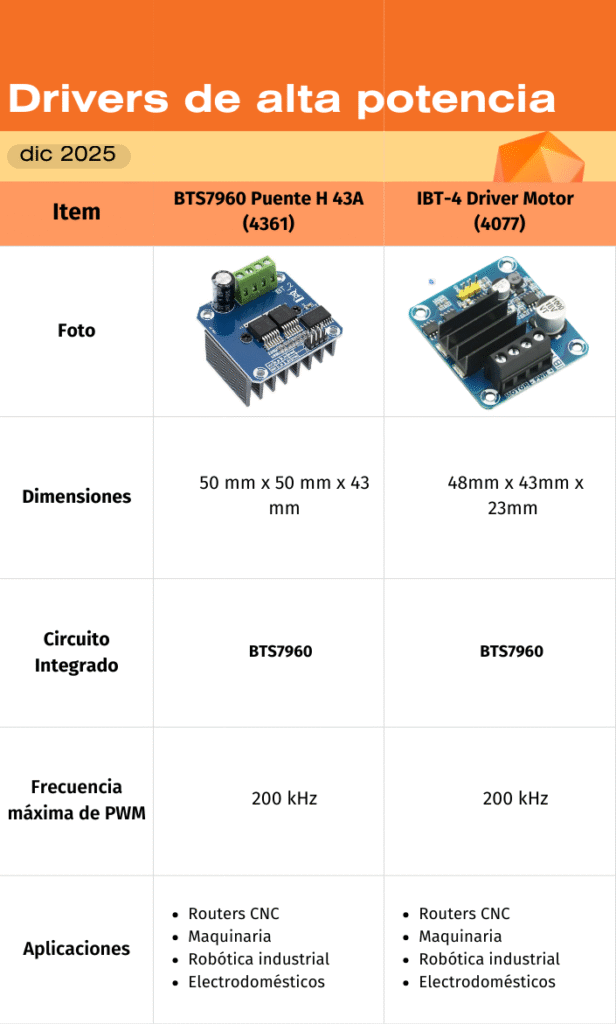
Mientras que los modelos de alta potencia se ubican en aplicaciones donde la disipación de calor no debe limitar a un sistema robótico industrial, por lo que responden con amplios rangos de tensión de alimentación y de corrientes de operación altos:
| BTS7960 Puente H 43A | IBT-4 Driver Motor |